EDA T9/T10 — Exhaustive Search and Generation
This presentation is an adaptation of material from Antoni Lozano and Conrado Martinez
Agenda
Last theory class
- Algorithms on Graphs
- BFS
- Dijkstra
- Minimum Spanning Trees
Today
- Exhaustive Search and Generation
- Pruning
- Branch & Bound
- Several examples
Before we start: Questions on previous material?
Intro
In many computational problems we must exhaustively explore a solution space.
Many times it is the only way we know to solve the problem at hand.
For instance,
- Generating all combinatorial objects of a given size
- bitstrings
- permutations
- trees
- graphs
- …
- Finding a non-menacing configuration of n queens in a n\times n chessboard (n-Queens)
- Finding a shortest Hamiltonian cycle in a weighted graph (Traveling Salesman Problem)
- …and many more
Brute force (aka Exhaustive Search)
Sometimes, the only way to solve a problem is to try all possible combinations. This trivial algorithm is called brute force or exhaustive search:
it can be practical for small input sizes
it can benefit from other techniques such as divide-and-conquer
usually is very slow (exponential, or worse). Still better than not having no algorithm at all. Do you know some computational problem for which there is no algorithm at all?
What is the cost of exhaustive search?
- if there is an implicit tree or graph to be explored, they are usually exponential (or worse)
- if the graph is given as input, they are polynomial.
BFS and DFS are also exhaustive searches, they run in polynomial time because the graph to explore is given explicitly as part of the input.
Generation
Example: Strings of Zeros and Ones
Input:
a natural number n
Output:
all sequences of 0s and 1s of length exactly n
What is the size of the output?
#include<iostream>
#include<vector>
using namespace std;
void binary(vector<int>& A, int k) {
if (k == A.size()){ // base case
for(int j = 0; j < k; ++j) cout << A[j];
cout << endl;
return;
}
// inductive case
A[k] = 0;
binary(A,k+1);
A[k] = 1;
binary(A,k+1);
}
int main(){
int n;
cin >> n;
vector<int> A(n);
binary(A,0);
}- 1
- i is the next position in A we will assign
A first blueprint for backtracking
void backtracking(int k, ...other parameters...){
if (k == base_case){// base case of the recursion
...
return;
}
// inductive case
...
}- 1
- Here we arrived to a full solution. Do here whatever you are supposed to do with a full solution, e.g. write it to cout.
- 2
-
Assume you already have a partial solution, for instance a vector whose entries up to k-1 represent a partial solution.
We want to extend the partial solution to a partial solution up to k, in all the possible allowed ways to extend the partial solution to a partial solution one element larger. (Sometimes this exploration is only on 2 elements, e.g.trueorfalseand it is not done explicitly with a for loop)
Example: Zeros and Ones with a fixed number of ones
Input:
two natural numbers n and \ell with \ell\leq n
Output:
all sequences of 0s and 1s of length n with exactly \ell ones
What is the size of the ouput?
Answer
\binom{n}{\ell} which is upper and lower bounded as follows \left(\frac{n}{\ell}\right)^\ell\leq \binom{n}{\ell}\leq \left(\frac{en}{\ell}\right)^\ell Hence for instance when \ell=\frac{n}{2}, \binom{n}{n/2} is exponentially large, unlike when say \ell=1.A first solution
#include<iostream>
#include<vector>
using namespace std;
void strings(vector<int>& A, int k, int l) {
if (k == A.size()) {
int c = 0;
for (int x : A) c += x; // Counts 1s
if (c == l){
for(int j = 0; j < k; ++j) cout << A[j];
cout << endl;
}
return;
}
A[k] = 0; strings(A, k+1, l);
A[k] = 1; strings(A, k+1, l);
}
int main(){
int n, l;
cin >> n >> l;
vector<int> A(n);
strings(A,0,l);
}- 1
-
A: partial string (size n)
k: first non-filled cell in A
l: total number of 1s we want
Do we really need to count from scratch the number of 1’s in A every time?
We could keep, at every moment, the number of 1s of the partial string.
This forces us to use one more parameter in the procedure.
#include<iostream>
#include<vector>
using namespace std;
void strings2(vector<int>& A, int k, int u, int l) {
if (k == A.size()) {
if (u == l){
for(int j = 0; j < k; ++j) cout << A[j];
cout << endl;
}
return;
}
A[k] = 0; strings2(A, k+1, u, l);
A[k] = 1; strings2(A, k+1, u+1, l);
}
int main(){
int n, l;
cin >> n >> l;
vector<int> A(n);
strings2(A,0,0,l);
}- 1
-
A: partial string (size n)
k: first non-filled cell in A
u: number of 1s inA[0...k-1](already filled)
l: total number of 1s we want
Can we detect situations in which a partial string cannot be extended to a total string with exactly \ell 1s?
If we can do that we can avoid to visit branches in the search tree, i.e. we prune the search space.
#include<iostream>
#include<vector>
using namespace std;
void strings3(vector<int>& A, int k, int z, int u, int l) {
if (k == A.size()){
for(int j = 0; j < k; ++j) cout << A[j];
cout << endl;
return;
}
if (z < A.size() - l) {
A[k] = 0; strings3(A, k+1, z+1, u, l);
}
if (u < l) {
A[k] = 1; strings3(A, k+1, z, u+1, l);
}
}
int main(){
int n, l;
cin >> n >> l;
vector<int> A(n);
strings3(A,0,0,0,l);
}- 1
-
A: partial string (size n)
k: first non-filled cell in A
u: number of 1s inA[0...k-1](already placed)
z: number of 0s inA[0...k-1](already placed)
l: total number of 1s we want - 2
- not all 0s placed
- 3
- not all 1s placed
Example: Permutations
Input:
a natural number n
Output:
all possible permutations of n
What is the size of the output?
Answer
n!#include<iostream>
#include<vector>
using namespace std;
void write_perm(int n, vector<int>& A, int k, vector<bool>& used) {
if (k == A.size()){
for(int j = 0; j < k; ++j) cout << A[j];
cout << endl;
return;
}
for (int i = 1; i <= n; ++i) {
if (not used[i]) {
A[k] = i;
used[i] = true;
write_perm(n,A,k+1,used);
used[i] = false;
}
}
}
int main() {
int n;
cin >> n;
vector<int> A(n);
vector<bool> used(n+1,false);
write_perm(n,A,0,used);
}- 1
- What happens if we don’t have this line of code?
A generic backtracking algorithm
The solution space is organized as a configuration tree. Each node or tree configuration is represented with a vector A = (a_1, a_2, . . . , a_k ) that contains the choices already made (the partial solution).
Vector A grows in the forward phase by choosing a_{k +1} from a set S_{k +1} of candidates (exploration in depth).
A is reduced in the backtracking phase (backtrack).
A second blueprint for backtracking
void backtracking(int k, ...other parameters...){
if (k == base_case){// base case of the recursion
...
return;
}
// inductive case
...for loop exploring all possible ways of extending...
}Inside the for loop exploring all the possible extensions, check whether the way you are trying to extend is allowed (this really depends on the problem at hand).
If it is allowed:
- Extend the partial solution.
- Call
backtrackingwith the the auxiliary structures upadted, i.e. callbacktracking(k+1, ...other parameters updated...); - Undo the update on the auxiliary structures to allow trying other branches of execution
Common errors
Trying to do more than one check in the
ifcondition of the base case. Or forgetting to have areturn;at the end. This will likely result in some unwanted execution, for instance entering in the inductive case whenk > base caseand perhaps going out the range of a vector.Assuming that the base case is k=0. This is not true!
The base case of the recursion is when we have a full solution. k=0 is signaling the opposite, the partial solution is empty, we have not made yet any progress towards a full solution.In the inductive case, trying to update
kwith++kor updating other quantities in the same way instead of callingbacktracking(k+1, ...).
Common errors
In the inductive case, not assuming you already have a partial solution up to
k-1, and therefore trying to compute it again, typically with some for loop.A common error is forgetting to undo the marking after the call to
backtracking(k+1, ...). This will result in exploring only one possible branch (one way of extending partial solutions). This might lead or not to a full solution.
Example: n-Queens
Input:
a positive integer n
Output:
write all possible positions of n queens in an n\times n chessboard such that no queen attack another one (i.e. each row, column or diagonal contains at most one queen).
A First solution
- finds all solutions using backtracking
- extends the partial solution whenever it is legal (can be extended to a complete solution)
Worst-cast cost in time: \Theta(n^n)
Use vector<int> t; to store the positions of the queens:
The queen in row i is in column t[i].
When two queens can attack each other?
The i-th queen and the j-th queen can attack each other if
t[i] == t[j](same column)t[i]-t[j] == i-j(same diagonal)t[i]-t[j] == j-i(same anti-diagonal)
bool attacked(int i) {
for (int k = 0; k < i; ++k)
if (t[k] == t[i] or t[k] - k == t[i] - i or t[k] + k == t[i] + i)
return true;
return false;
}- 1
- This function checks given the positions of the queens up to i, if the i-th queen is attacked by the previous ones.
To write the output we use write()
Q.......
....Q...
.......Q
.....Q..
..Q.....
......Q.
.Q......
...Q....Using the functions write and attacked then we can output all the solutions as follow:
A Second solution: using marking
Instead of computing whether a position is attacked every time we can use a marking strategy remembering which rows/columns/diagonals are not allowed since they already have a queen in it.
- mark used columns (
vector<bool>of size n) - 2n-1 anti-diagonals, identified by i+j. I.e. numbers between 0 and 2n-2. Use a
vector<bool>of size 2n-2. - 2n-1 diagonals, identified by i-j. This gives numbers between -(n-1) and n-1. It is more convenient to use i-j+(n-1), which gives numbers between 0 and 2n-2. Use a
vector<bool>of size 2n-2.
#include <iostream>
#include <vector>
using namespace std;
int n;
vector<int> t;
// mc[j] == queen at column j
// md1[k] == queen at diagonal i+j = k, etc.
vector<int> mc, md1, md2;
void queens(int i);
int main() {
cin >> n;
t = vector<int>(n);
mc = vector<int>(n, false);
md1 = md2 = vector<int>(2*n-1, false);
queens(0);
}queens function
If we only wanted to print one solution?
bool queens(int i) {
if (i == n){
write();
return true;
}
for (int j = 0; j < n; ++j) // j is column for queen of row i
if (not mc[j] and not md1[i+j] and not md2[i-j + n-1]) {
t[i] = j;
mc[j] = md1[i+j] = md2[i-j + n-1] = true;
if (queens(i+1)) return true;
mc[j] = md1[i+j] = md2[i-j + n-1] = false;
}
return false;
}If we wanted to count solutions?
int queens(int i) {
if (i == n){
return 1;
}
int res = 0;
for (int j = 0; j < n; ++j) // j is column for queen of row i
if (not mc[j] and not md1[i+j] and not md2[i-j + n-1]) {
t[i] = j;
mc[j] = md1[i+j] = md2[i-j + n-1] = true;
res += queens(i+1);
mc[j] = md1[i+j] = md2[i-j + n-1] = false;
}
return res;
}Example: Latin Squares
Input:
a positive integer n
Output:
all Latin squares of size n, i.e. all n\times n grids filled with n distinct symbols and each symbol appear once in every row and column.

Backtracking solution with markings
#include <iostream>
#include <vector>
using namespace std;
int n;
vector<vector<int>> q;
vector<vector<bool>> r;
vector<vector<bool>> c;
void latin_square(int i, int j);
int main () {
cin >> n;
q = vector<vector<int>>(n, vector<int>(n));
r = c = vector<vector<bool>>(n, vector<bool>(n, false));
latin_square(0, 0);
}- 1
-
q[i][j]equals value at row i, column j - 2
-
r[i][v]equals whether row i already uses value v - 3
-
c[j][v]equals whether column j already uses value v
Cost: \mathcal O(n^{n^2} )
latin_square function
// Find all Latin squares completing from (i, j)
void latin_square(int i, int j) {
if (i == n)
return write();
if (j == n)
return latin_square(i+1, 0);
for (int v = 0; v < n; ++v) {
if (not r[i][v] and not c[j][v]) {
r[i][v] = c[j][v] = true;
q[i][j] = v;
latin_square(i, j+1);
r[i][v] = c[j][v] = false;
}
}
}More search problems
Example: Knight’s tour
Input:
a positive integer n and i,j\leq n
Output:
a sequence of positions of the n\times n board s.t.
- they start from position (i,j)
- they are covering all the positions of the board and
- any two consecutive positions are reachable using a knight’s move.
A backtracking solution
#include <iostream>
#include <vector>
using namespace std;
int n;
vector<vector<int>> t;
bool possible(int i, int j, int s);
int main() {
int i, j;
cin >> n >> i >> j;
t = vector<vector<int>>(n, vector<int>(n, -1));
cout << possible(i, j, 0) << endl;
}- 1
-
t[i][j] == kif in the k-th jump we arrive at (i,j)
-1 if we have not arrived at (i,j) yet - 2
- Can we fill board starting at (i, j) having done s jumps?
vector<int> di = {1, 1, -1, -1, 2, 2, -2, -2};
vector<int> dj = {2, -2, 2, -2, 1, -1, 1, -1};
bool possible(int i, int j, int s) {
if (i >= 0 and i < n and j >= 0 and j < n and t[i][j] == -1){
t[i][j] = s;
if (s == n*n-1) return true;
for (int k = 0; k < 8; ++k)
if (possible(i + di[k], j + dj[k], s+1)) return true;
t[i][j] = -1;
}
return false;
}Example: Hamiltonian Cycle
Input:
a graph G
Output:
True/False according whether G has a Hamiltonian cycle, i.e. a cycle that visits each vertex of G exactly once

vector<vector<int>> G;
int n; //number of vertices
vector<int> s;
bool found;
vector<int> sol;
void hamilton(int v, int t);
int main(){
...read the input graph G...
n = G.size();
s = vector<int>(n, -1);
found = false;
hamilton(0,1);
cout << found << endl;
}- 0
- The input graph. Assume it is connected and represented via adjacency lists
- 1
-
sis the partial solution we build.s[i]is the vertex afteriin the partial solution (−1 if not used yet) - 2
- whether we have already found a cycle
- 3
- a hamiltonian cycle (if found)
- 4
-
v= last vertex in the path
t= number of vertices in the path
Optimization problems
Example: Knapsack
Input:
a positive integer C and n pairs of numbers (v_1,w_1),\dots,(v_n,w_n)
Output:
a subset S of \{1,\dots,n\} such that
- \sum_{i\in S} w_i\leq C and
- \sum_{i\in S}v_i is maximum, i.e. for every other subset T such that \sum_{i\in T} w_i\leq C we have \sum_{i\in S}v_i\geq \sum_{i\in T}v_i

First solution: prune when capacity is exceeded
#include <iostream>
#include <vector>
using namespace std;
int c; // Capacity
int n; // Number of objects
vector<int> w; // Weights
vector<int> v; // Values
vector<int> s; // (Partial) Solution we are building
// s[i] == 1 iff i-th object is chosen
int bv = -1; // Best value so far
vector<int> bs; // Best solution so far
void opt(int k, int swp, int svp);
int main() {
cin >> c >> n;
w = v = s = vector<int>(n);
for (int& x : p) cin >> x;
for (int& x : v) cin >> x;
opt(0, 0, 0);
cout << bv << endl;
}void opt(int k, int swp, int svp) { // swp: sum weights partial
if (swp > c) return; // Exceed capacity: do not continue
if (k == n) {
if (svp > bv) { // Improve best solution so far
bs = s;
bv = svp;
}
return;
}
// Discard obj. k
s[k] = 0;
opt(k+1, swp, svp );
// Choose obj. k
s[k] = 1;
opt(k+1, swp + w[k], svp + v[k]);
}Second solution: Branch and Bound
Prune also when we cannot improve the best cost found so far
#include <iostream>
#include <vector>
#include <algorithm>
using namespace std;
...same global parameters as before...
// svr: sum values remaining
void opt(int k, int swp, int svp, int svr);
int main() {
cin >> c >> n;
p = v = s = vector<int>(n);
for (int& x : p) cin >> x;
for (int& x : v) cin >> x;
sum = accumulate(v.begin(), v.end(), 0);
opt(0, 0, 0, sum);
cout << bv << endl;
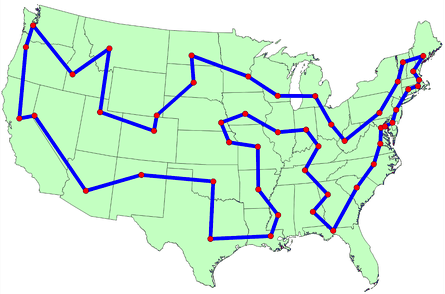
}Example: Travelling Salesman Problem (TSP)
The Travelling Salesman Problem (TSP) consists in, given a network of cities, finding the order in which we should visit the cities such that:
- we start and finish in the same city
- we visit each city exactly once, and
- the total travelled distance is as small as possible
- It is one of the most famous combinatorial optimization problems
- It is important from the theoretical point of view
- It has practical applications in
- planning
- logistics
- microchips manufacturing
- DNA sequence
- astronomy
- …
class TSP {
int n; matrix<int> M; vector<int> s; vector<int> best_sol; double best_cost;
void recursive (int v, int t, double c) {
if (t == n) {
c += M[v][0];
if (c < best_cost) {
best_cost = c;
best_sol = s;
best_sol[v] = 0;
}
return;
}
for(int u = 0; u < n; ++u)
if (u != v and s[u] == -1) {
if (c + M[v][u] < best_cost) {
s[v] = u;
recursive(u, t+1, c + M[v][u]);
s[v] = -1;
}
}
}
public:
TSP (matrix& M) {
this->M = M;
n = M.rows();
s = vector<int>(n, -1);
best_sol = vector<int>(n);
best_cost = infinite;
recursive(0, 1, 0);
}
vector<int> solution ( ) { return best_sol; }
int next (int x) { return best_sol[x]; }
double cost ( ) { return best_cost; }
};- 1
-
n: number of cities
M: matrix of distances
sis the partial solution we build.s[i]is next city after cityi(−1 if not yet used)
best_sol: best solution found so far
best_cost: cost of best solution found so far - 2
-
v: last vertex in partial solution s
t: size of the path given by s
c: cost of s
Current best solution pruning (CBSP)
Current best solution pruning (CBSP) is a technique that can be applied whenever we want to solve optimization problems (maximization or minimization). Say, our goal is to find a solution of minimum cost.
Let x be the current solution, and best_cost the cost of the best solution found so far. We compute an estimation of the cost of the best solution that we can find from x (estimated_cost). It must be a lower bound the cost of the best solution that we could find from x (real_best_cost).
Then if estimated_cost > best_cost we can prune at x and avoid exploring its descendants in the recursion tree: no solution found there will be better than the one we already have.
Upcoming classes
- Wednesday
- Lab class P5 on exhaustive search (do the exercises before class).
- Next Monday
- Theory class T11 on Intractability
Questions?